
在傳感器構(gòu)成的無形天網(wǎng)中�,雷達(dá),尤其是毫米波雷達(dá)�,正成爲(wèi)越來越多智能系統(tǒng)的“核心感官”。從自動(dòng)駕駛汽車預(yù)判風(fēng)險(xiǎn)���,到智能家電感知你的存在��,它的可靠“視力”源於兩項(xiàng)關(guān)鍵能力:看清前後的距離分辨率��,
與辨明左右的角度分辨率�����。正是這兩把無形的標(biāo)尺����,定義了雷達(dá)區(qū)分複雜環(huán)境中緊密相鄰目標(biāo)的能力極限�����。
一��、距離分辨率
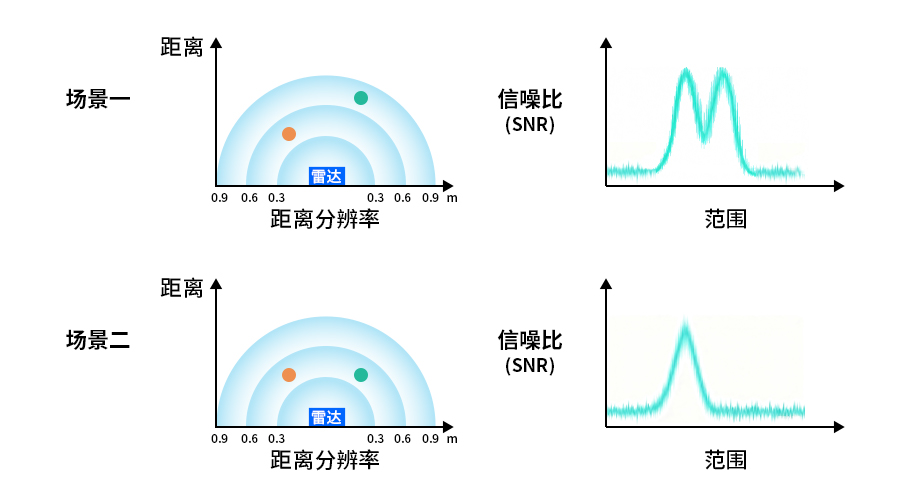
想象兩輛車在同一車道上一前一後行駛�。雷達(dá)能否將它們識(shí)別爲(wèi)兩個(gè)獨(dú)立目標(biāo),而非一箇模糊的團(tuán)塊�����,就取決於它的距離分辨率�。它指的是雷達(dá)在視線方向上,能區(qū)分開兩個(gè)目標(biāo)的最小距離間隔��。
其背後的物理法則簡(jiǎn)潔而有力:
分辨率由雷達(dá)發(fā)射信號(hào)的帶寬決定���。公式 ΔR = c / (2B)(c爲(wèi)光速�,B爲(wèi)帶寬)揭示了一切:帶寬越大���,分辨率越高(數(shù)值越?�。?����,區(qū)分能力越強(qiáng)�。
以汽車領(lǐng)域主流的77GHz頻段爲(wèi)例,當(dāng)雷達(dá)擁有4GHz的超大帶寬時(shí)��,其理論距離分辨率可達(dá)驚人的3.75釐米���。這意味著它不僅能分辨車輛與車輛��,甚至能勾勒出行人的肢體輪廓���,爲(wèi)自動(dòng)緊急制動(dòng)(AEB)系統(tǒng)提供釐米級(jí)的
決策依據(jù)。相比之下����,早期帶寬較窄的24GHz雷達(dá),分辨率可能僅約60釐米��,能力差距立現(xiàn)�����。
必須劃清界限的是:距離分辨率≠距離精度
分辨率關(guān)乎“區(qū)分兩個(gè)物體”:
能分辨間距5釐米的兩個(gè)目標(biāo)�,優(yōu)於只能分辨10釐米的�。
精度關(guān)乎“定位單個(gè)物體有多準(zhǔn)”:
對(duì)一箇距離1米的目標(biāo)��,測(cè)量結(jié)果爲(wèi)0.99米����,其精度就是1釐米����。
現(xiàn)代高集成度毫米波雷達(dá)芯片,無需改動(dòng)硬件就能實(shí)現(xiàn)3釐米級(jí)別的距離分辨率����。在實(shí)際點(diǎn)雲(yún)圖中,人體因此會(huì)呈現(xiàn)爲(wèi)一簇密集的探測(cè)點(diǎn)��,物體分離清晰可辨�。
二、角度分辨率
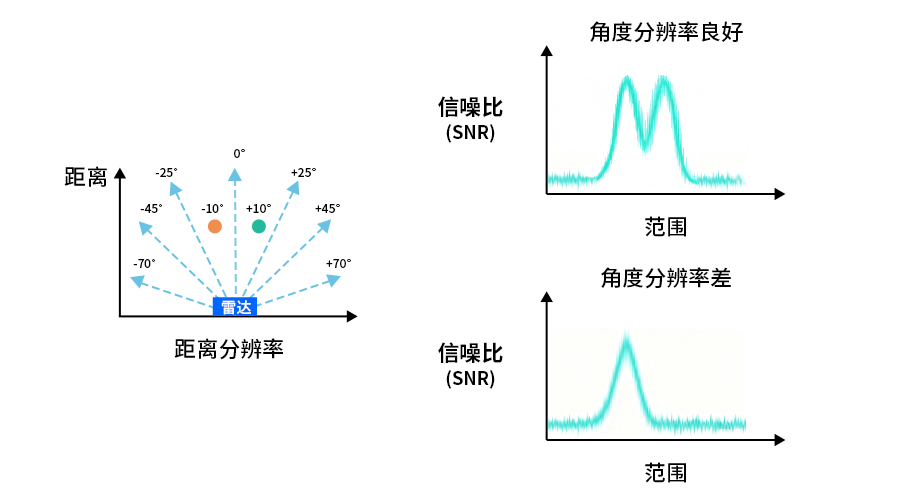
當(dāng)兩輛車並排行駛在相鄰車道�,距離雷達(dá)同樣遠(yuǎn)近時(shí),雷達(dá)就需要角度分辨率來分辨它們���。它定義了雷達(dá)對(duì)於相同距離上���、方位不同的兩個(gè)目標(biāo)的最小可區(qū)分角度�。
這項(xiàng)能力依賴於雷達(dá)的多天線陣列����。目標(biāo)反射的波到達(dá)不同天線時(shí)存在微小的路徑差,轉(zhuǎn)化爲(wèi)相位差�����。通過解讀這些相位差���,雷達(dá)就能計(jì)算出目標(biāo)的方位��。
理論上���,角度分辨率Δθ≈λ/ (L * cosθ)。其中��,波長(zhǎng)(λ)越短����、天線陣列的有效孔徑(L)越長(zhǎng),分辨率就越高����。
因此��,提升角分辨率的核心路徑是:
增加天線數(shù)量��,以增大“接收孔徑”����。
使用更高頻率(如77GHz對(duì)比24GHz)��,以獲得更短的波長(zhǎng)���。
採(cǎi)用MIMO(多輸入多輸出)技術(shù),這是關(guān)鍵突破�。通過巧妙的發(fā)射與接收時(shí)序設(shè)計(jì),可以用較少的物理天線����,虛擬出數(shù)倍於此的“虛擬天線”陣列,從而大幅提升分辨率�。例如,一箇4發(fā)4收的物理陣列��,能形成16個(gè)虛擬通道���。
在實(shí)際產(chǎn)品中�����,角度分辨率因設(shè)計(jì)目標(biāo)差異巨大:高性能4D成像雷達(dá)可達(dá)1°的卓越水平�����,而一些基礎(chǔ)型號(hào)可能在15°-30°之間�。同樣需要區(qū)分的是角度精度,它指測(cè)量單個(gè)目標(biāo)角度的準(zhǔn)確度��,通常在視軸附近可達(dá)±1°甚至更高�����。
三�、算法的智慧
毫米波雷達(dá)的感知魔法,遠(yuǎn)不止於天線數(shù)量和帶寬這些“硬指標(biāo)”��。先進(jìn)的信號(hào)處理算法���,能讓其“視力”突破傳統(tǒng)理論的框限��。
多普勒分身術(shù):這是雷達(dá)的獨(dú)門絕技�。即使兩個(gè)目標(biāo)在距離和角度上完全重合�,只要它們的徑向速度不同��,雷達(dá)也能通過多普勒效應(yīng)將其清晰分離�。這在實(shí)際路況中價(jià)值連城���。
算法增強(qiáng)視力:除了標(biāo)準(zhǔn)的FFT波束成形�,更復(fù)雜的算法(如Capon�、MVDR)能在相同天線配置下,將角度分辨率提升近一倍�,生成更密集����、更清晰的點(diǎn)雲(yún)。
系統(tǒng)級(jí)進(jìn)化:產(chǎn)業(yè)界通過多芯片級(jí)聯(lián)��、虛擬孔徑合成等技術(shù)�����,不斷推動(dòng)分辨率向極限邁進(jìn)��,同時(shí)兼顧成本與體積���。
與攝像頭�����、激光雷達(dá)相比����,毫米波雷達(dá)在分辨率故事中有其獨(dú)特定位:
對(duì)比攝像頭:攝像頭雖有極高的像素(角度分辨率),但無法直接測(cè)距����、測(cè)速,且受光照天氣影響大����。雷達(dá)提供的是帶有精確距離和速度信息的“數(shù)據(jù)點(diǎn)雲(yún)”,而非光學(xué)圖像����。
對(duì)比激光雷達(dá):激光雷達(dá)能提供極高的角度和距離分辨率,形成精細(xì)的3D點(diǎn)雲(yún)�,但成本高昂,且在雨雪霧霾中性能驟降���。毫米波雷達(dá)則以更低的成本�����、強(qiáng)大的環(huán)境適應(yīng)性和直接的速度測(cè)量能力見長(zhǎng)����。
雷達(dá)的核心優(yōu)勢(shì)在於融合感知:它能同時(shí)提供目標(biāo)的距離、角度�����、速度三維信息����。這種多維度數(shù)據(jù)融合,使其在實(shí)現(xiàn)高可靠性的目標(biāo)識(shí)別與跟蹤上具有不可替代的價(jià)值����。
文章參考資料:
https://www.ti.com/lit/ab/swra841/swra841.pdf?ts=1762618105105
四�����、總結(jié)
距離分辨率與角度分辨率�,共同構(gòu)成了毫米波雷達(dá)感知世界的座標(biāo)尺。從自動(dòng)駕駛中區(qū)分相鄰車道的車輛��,到智能家居中感知微動(dòng)���,這兩把“標(biāo)尺”的精確度直接決定了智能系統(tǒng)認(rèn)知環(huán)境的清晰度�����。想瞭解更多關(guān)於雷達(dá)可以看看
《預(yù)告 多目標(biāo)追蹤24G雷達(dá)傳感》和《開啓指尖配置智能感知新時(shí)代》����。
聯(lián)繫我們
深圳市海凌科電子有限公司
電話:0755-2315 2658
地址:深圳市龍華區(qū)民治街道民樂社區(qū)星河WORLD二期E棟1705、1706�����、1709A













擊開始AI聊天")
擊開始QQ交談/留言")
擊開始旺旺交談/留言")
